Статьи
Динамические характеристики шаговых приводов
Опубликовано: 02.10.2018

Компания «НПФ Электропривод» разрабатывает шаговые приводы для любых двух- и четырехфазных двигателей. Главным критерием разработки является возможность управления как отечественными, так и импортными шаговыми двигателями. Определяющим фактором при выборе устройства управления является исключительно ток фазы.
Компания предлагает как драйвера, так и программируемые контроллеры для управления шаговыми двигателями. Драйвер шаговых двигателей – устройство, управляющее одним двигателем в соответствии с подаваемыми импульсными сигналами шаг/направление, определяющими скорость и направление движения.
Винил. Как выбрать проигрыватель пластинок
Контроллер шаговых двигателей – устройство, управляющее одним или несколькими двигателями и дающее возможность выбора режима управления: ручной режим – задание параметров движения осуществляется с помощью кнопок и потенциометров, расположенных на самом блоке; режим драйвера – управление подаваемыми импульсными сигналами шаг/направление; режим контроллера – запись программы движения в энергонезависимую память блока. Программа дает возможность использовать не только такие простые команды как задание скорости, перемещения, ускорения, но также формировать циклы повторяющихся команд, выставлять паузы, использовать встроенное в контроллер реле и два дополнительных управляющих входа для синхронизации работы с другим оборудованием.
В качестве источника импульсных сигналов может быть использован разработанный двухканальный контроллер SMC-2, который дает возможность управления двумя приводами одновременно и кроме ручного управления предлагает режим программирования каждого канала в отдельности: импульсы подаются в соответствии с составленной программой.
Двигатель постоянного тока
Как известно, одними из основных проблем при использовании шаговых двигателей является потеря момента на больших скоростях и явление резонанса. Для борьбы с резонансом используют дробление шага. Предлагаемые шаговые приводы позволяют дробить шаг в 2, 4, 8, 16, 32 раза.
На больших скоростях ток в обмотках двигателя не успевает достигнуть номинального значения, что приводит к падению момента. Чтобы падение момента происходило как можно медленнее, нужно обеспечить высокую скорость нарастания тока в обмотках двигателя, за что отвечает блок управления. Так же для достижения большой скорости необходимо обеспечивать плавный разгон и торможение, это возможно выполнить с использованием предлагаемых компанией контроллеров.
«НПФ Электропривод» ведет научно-исследовательскую работу в области усовершенствования систем управления шаговыми двигателями.
В целях исследования влияния увеличения скорости на момент в 2012 году был разработан динамометрический стенд, изображенный на рис.1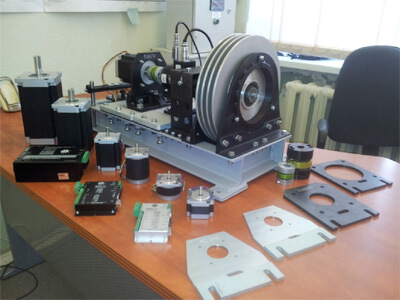 Рис. 1. Динамометрический стенд
Рис. 1. Динамометрический стенд
Стенд позволяет снимать характеристики двигателей в диапазоне:
скорости 0…3000об/мин; момента 0…50Нм.На рис. 2 приведена типичная зависимость момента от скорости шагового двигателя с драйвером серии SMD при напряжении питания 48В, дроблении шага 1/2 и 1/16. Как видно из графика, дробление шага на низких скоростях не приводит к падению момента, уменьшает влияние резонанса и расширяет динамический диапазон работы двигателя.
| Скорость | ||
| Шаг/с | 1/2 об/мин | 1/16 об/мин |
| 1000 | 150 | 19 |
| 2000 | 300 | 37,5 |
| 3000 | 450 | 56 |
| 4000 | 600 | 75 |
| 5000 | 750 | 94 |
| 6000 | 900 | 112,5 |
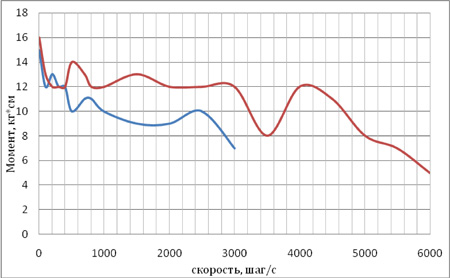
Рис. 2. График зависимости крутящего момента двигателя FL57STH76-2804 с драйвером SMD-4.2 (напряжение питания 48 В): а – дробление шага 1/2, б – дробление шага 1/16…1/8 оказывает благоприятно влияние на работу двигателя.
На рис. 3 наглядно отображены преимущества и недостатки последовательного и параллельного подключения обмоток.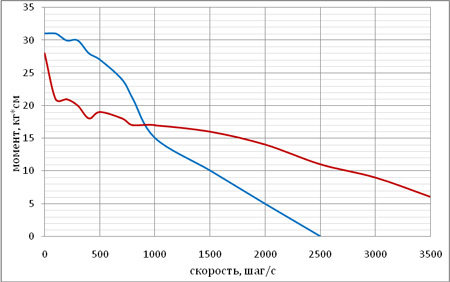
Рис. 3. График зависимости крутящего момента двигателя AD-200-31 с драйвером SMD-4.2 (напряжение питания 48В, дробление 1/2): а – последовательное подключение обмоток,
б – параллельное подключение обмоток. Как видно из графика, при последовательном подключении обмоток статический крутящий момент выше, но с ростом частоты он падает значительно быстрее. При параллельном подключении обмоток статический момент ниже, но сохраняется постоянным дольше. Такие данные позволяют не только подобрать подходящий двигатель и блок управления, но и выбрать способ подключения обмоток, в зависимости от поставленной перед двигателем задачей.